Implementace zlepšovacího návrhu na jiná pracoviště
|
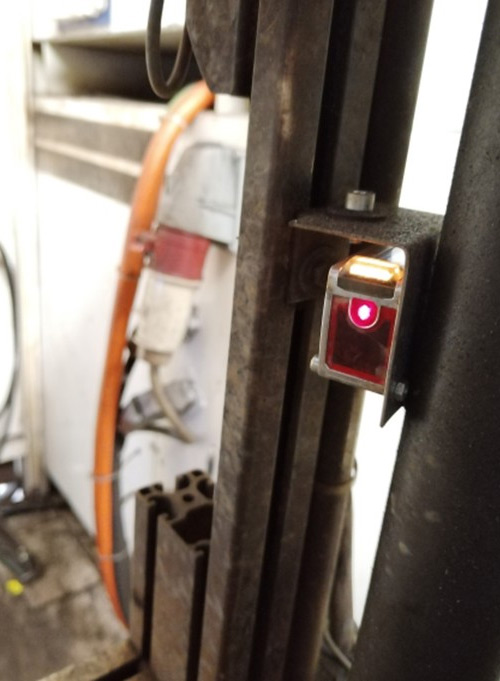
Situace před Na ROB58 je třeba každou směnu měnit odrazky na přítomnost dílu ve formě. Odrazky se ničí z důvodu blízkého svařování.
|
Situace po Výměna senzoru SICK za inteligentní senzor KEYENCE, který umí snímat v nastavené vzdálenosti (nepotřebuje odrazku) - eliminace prostojů.
|

Navrhovatel a realizátor: David Krmenčík